
Traffic Camera Tracking Software (SAVeNoW)
Main goals of this project is to detect, track and obtain velocity information of seven different traffic actors (Escooter, Pedestrians, Cyclists, Motorcycle, Car, Truck, Bus) from a video footage of a traffic intersection in Ingolstadt. This project is a part of SaveNoW, where all these data are used to create a digital twin of Ingolstadt for simulation purposes.
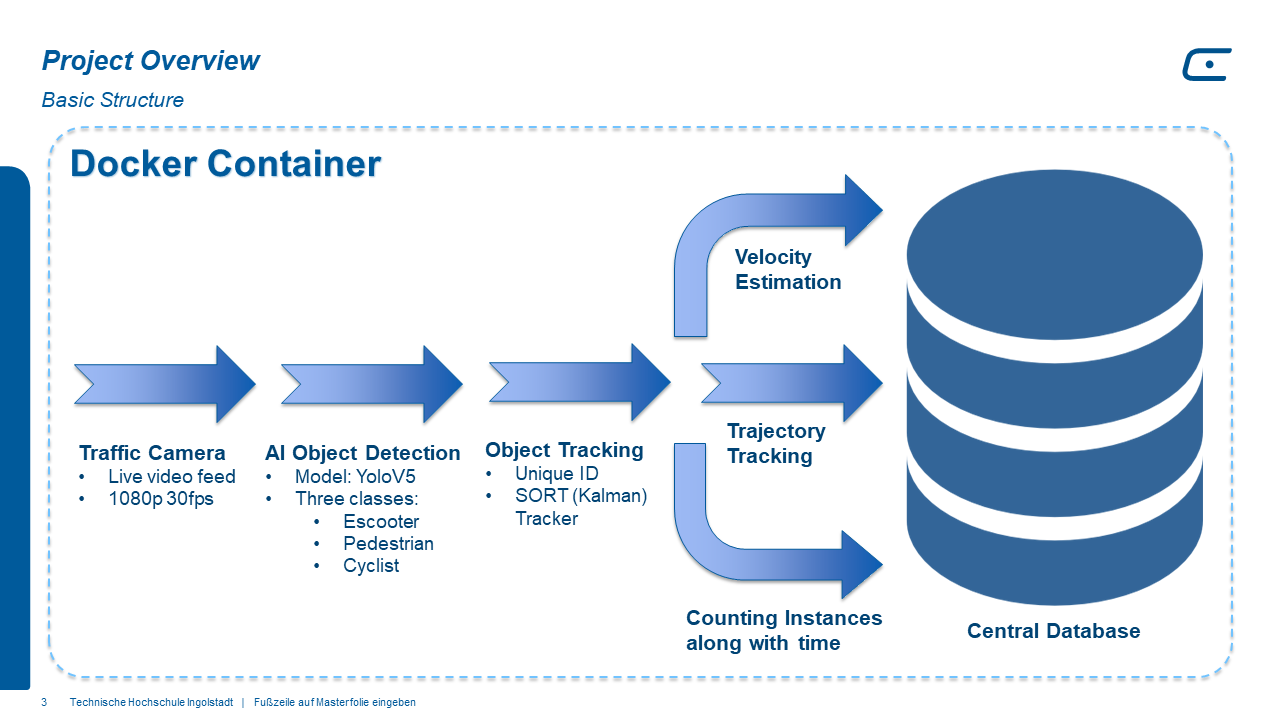
This algorithm has been specially trained to distinguish between cyclists, e-scooter riders and pedestrians. This data is important to better study the traffic density and the behavior of e-scooters. The weights of the Network are currently not part of the Github repo. If you are interessted in the weights, please contact Pascal Brunner.
Daten und Ressourcen
-
Traffic Camera Tracking (SaveNow)git
Main goals of this project is to detect, track and obtain velocity...
Dieser Katalogeintrag ist explizit mit anderen verbunden. Um weitere Informationen zu erhalten, gehen Sie bitte auf "Verknüpfungen" (auf den Link oder auf Register "Verknüpfungen" oberhalb der Überschrift des Katalogeintrages klicken).
Zusätzliche Informationen
| Feld | Wert |
|---|---|
| Autor |
|
| Verantwortlicher |
|
| Sprache | |
| Version | |
| Start des Gültigkeitszeitraumes | |
| Ende des Gültigkeitszeitraumes | |
| Räumliche Ausdehnung |
Räumliche AusdehnungMap data © OpenStreetMap contributors
Tiles by Stamen Design (CC BY 3.0)
|
| spatial | {"type":"MultiPolygon","coordinates":[[[[11.42355,48.774519],[11.42355,48.775905],[11.426468,48.775905],[11.426468,48.774519],[11.42355,48.774519]]]]} |
| Benutzerdefiniertes Feld |