
rtron
a road space model transformer library for OpenDRIVE, CityGML and beyond
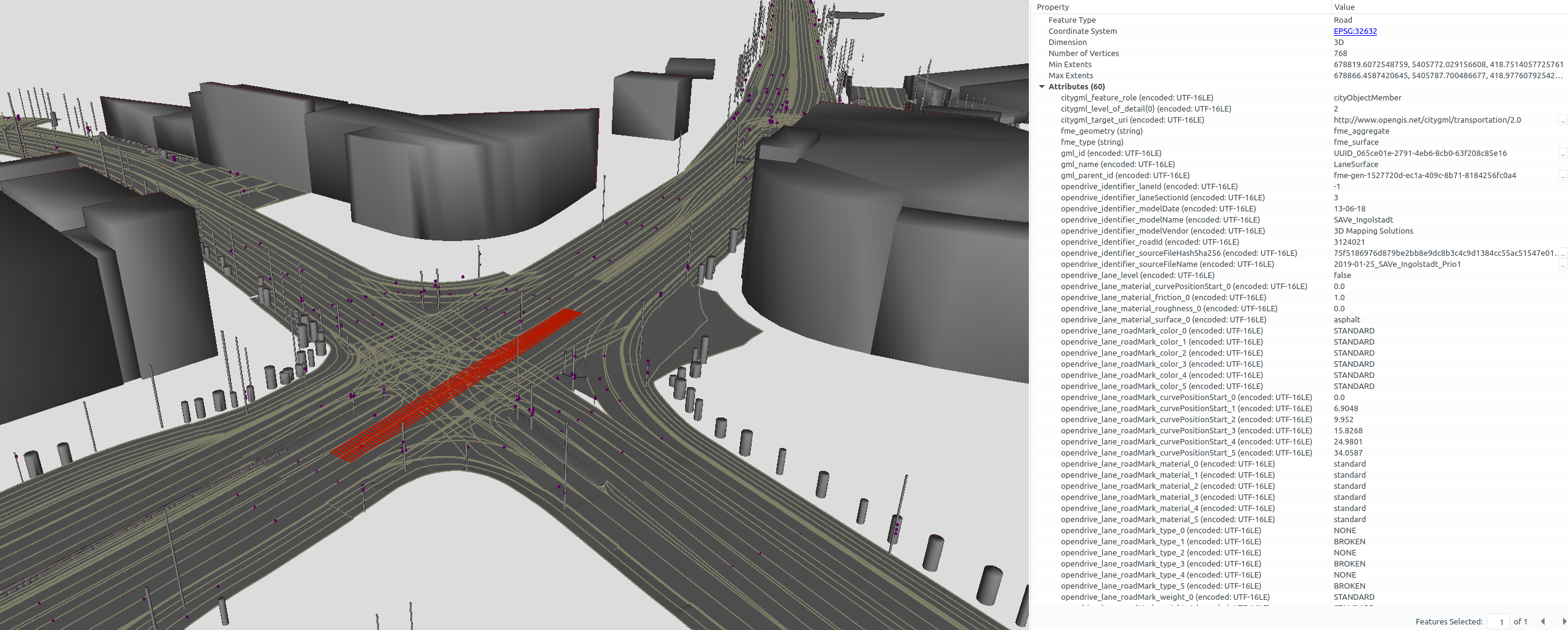
r:trån reads road network models in OpenDRIVE and transforms them to the virtual 3D city model standard CityGML.
This enables you to:
- inspect your spatio-semantic road space models
- conduct further model transformations with tools like FME
- perform geospatial analyses on the 3D City Database
- deploy virtual globes
- load your models into a desktop GIS
- compare and validate your models with models from other data sources
Daten und Ressourcen
Zusätzliche Informationen
| Feld | Wert |
|---|---|
| Autor |
|
| Verantwortlicher |
|
| Sprache | Deutsch |
| Version | |
| Start des Gültigkeitszeitraumes | |
| Ende des Gültigkeitszeitraumes | |
| Räumliche Ausdehnung | |
| Benutzerdefiniertes Feld |